











Soru Sorabilmek İçin Giriş Yapın
CUAV NEO 4 Nano Mini GNSS Modülü – DroneCAN GPS, U-blox M10 ile UAV Drone ve Robotik ürünler için
Data Sheet
| Item | Details | |
|---|---|---|
| Receiver Type | u-blox MIA-M10Q | |
| Processor | STM32H5 Arm® Cortex®-M33 250 MHz | |
| Compass | IIS2MDC | |
| Frequency Band | GPS: L1 C/A GLONASS: L1OF BDS: B1I/B1C Galileo: E1B/C | |
| Augmentation Systems | SBAS: EGNOS, GAGAN, MSAS, WAAS, BDSBAS, KASS and SouthPAN QZSS L1S (SLAS) | |
| Number of Concurrent GNSS | 4 (BDS, Galileo, GLONASS, GPS) | |
| Oscillator | TCXO | |
| Acquisition | Cold Start 27s Hot Start 1s Aided Start 1s | |
| Nav. Update Rate | Up to 10 Hz (4-concurrent GNSS) Up to 25 Hz (single GNSS) | |
| Horizontal Position Accuracy | 1.5 m CEP | |
| Signal Integrity | RF interference and jamming detection and reporting Spoofing detection and reporting | |
| Wave Filtering | SAW+LNA+SAW+LNA | |
| Anti Electromagnetic / Radio Frequency Interference | EMI+RFI | |
| Protocol | DroneCAN | |
| Upgrade Firmware | Support | |
| Firmware | CUAV M4C GNSS | |
| Data Interface | GHR-04V-S | |
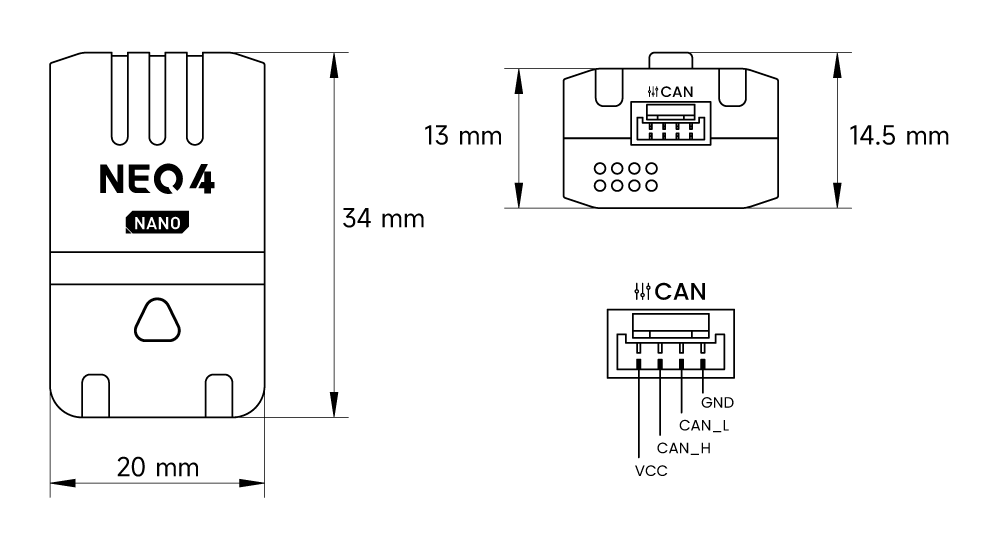
| Size | 34 × 20 × 14.5 mm | |
| Weight | 10.6 g | |
| Input Voltage | 4.5 ~ 5.4 V | |
| Operating Temperature | -10 ~ +80 ℃ |
Size and Pinout
Connecting to the Controller
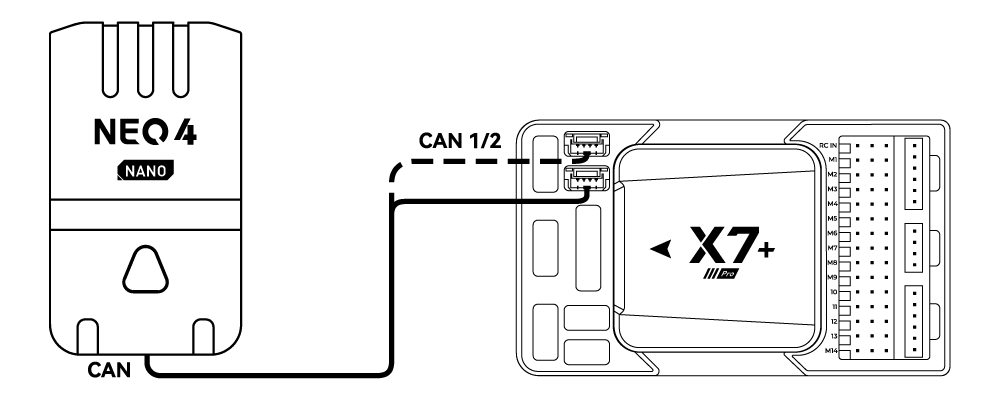
- Connect to the flight controller’s CAN1 / CAN2 port (CAN1 is recommended).
Tip
The flight controller must support the DroneCAN protocol, such as ArduPilot and PX4 flight stacks.
Controller Parameter Setup
Before use, you need to configure the flight controller parameters to enable the Neo 4 Nano; the method varies depending on the controller firmware.
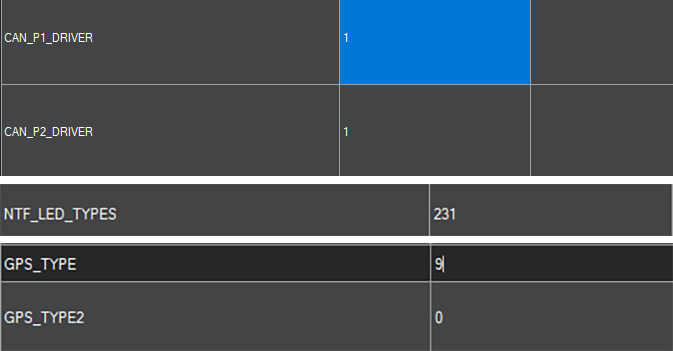
ArduPilot Firmware
In Mission Planner’s Full Parameter List, set the following parameters, write them, and then reboot:
CAN_P1_DRIVERset to 1.CAN_P2_DRIVERset to 1.NTF_LED_TYPESset to 231.GPS_TYPE/GPS1_TYPEset to 9 (if used as GPS1).
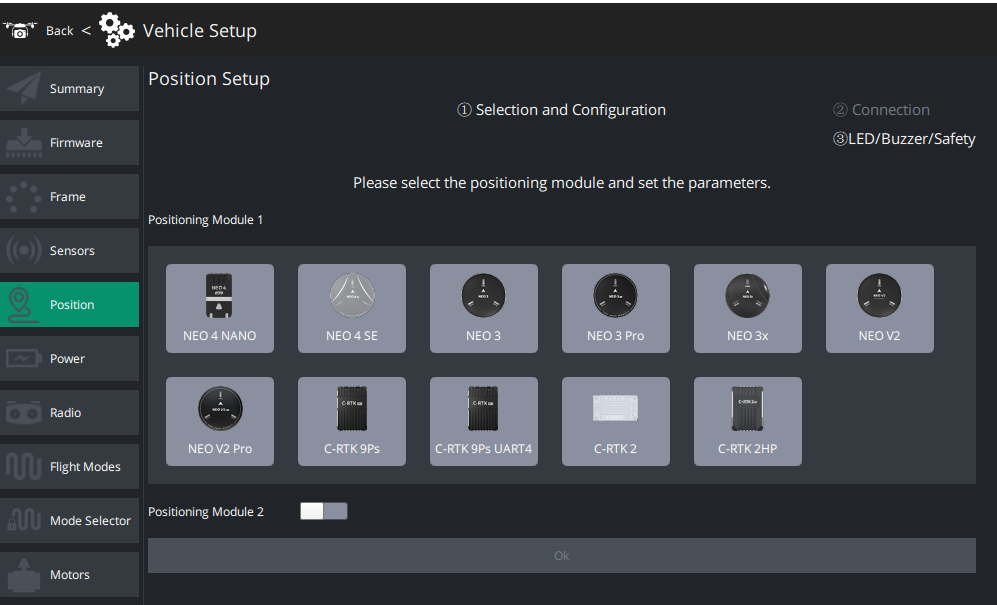
Using the LGC ground station, you can configure it quickly without manual parameter adjustment.
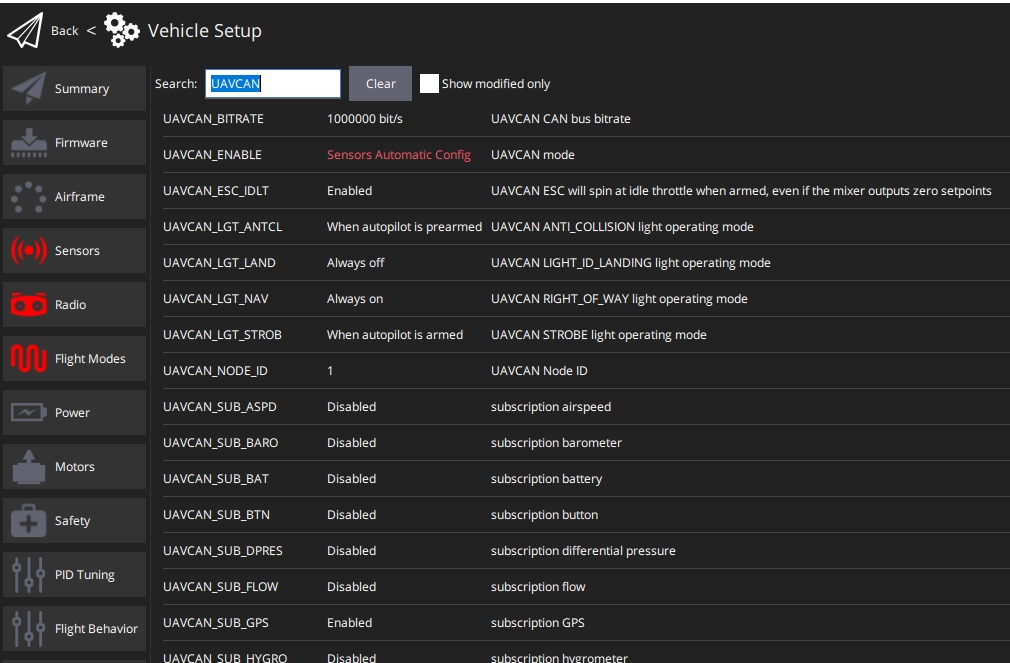
PX4 Firmware
In QGroundControl > Parameters, set the following parameters, write them, and then reboot:
UAVCAN_ENABLEset to Sensors Automatic config.UAVCAN_SUB_GPSset to Enable.
Marka
Marka
CUAV
Hiç mesaj bulunmadı